视频案例:高精度钢圈冲压拆垛方案——图漾3D视觉+ABB多轴机器人
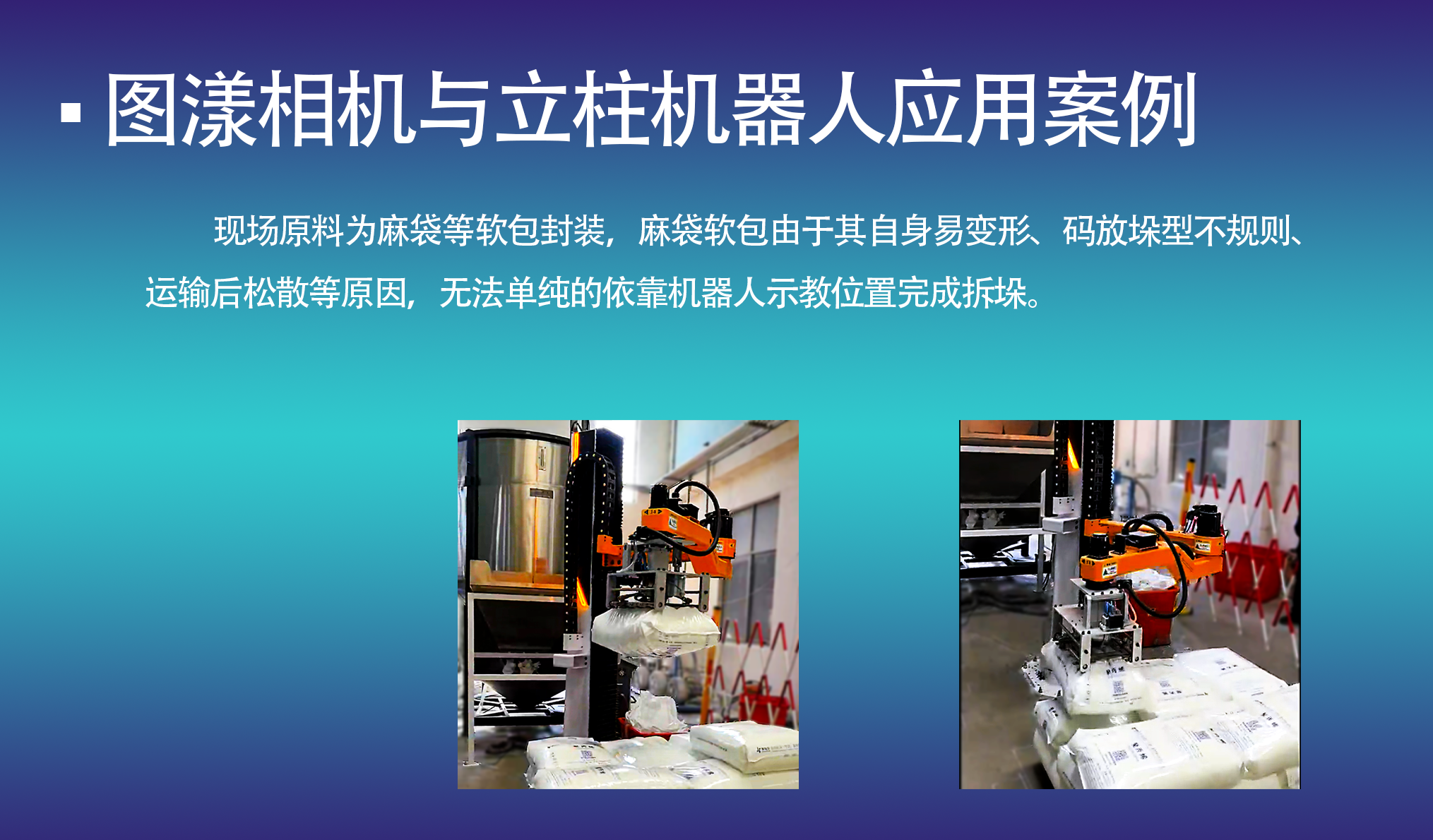
场景:某汽车轮毂制造厂冲压车间,需对反光金属钢圈进行高速拆垛与精准定位冲压。
方案配置
视觉系统:图漾科技FM815系列3D工业相机,搭载RVS机器视觉开发平台,支持动态点云建模与深度学习算法;
机器人:ABB IRB6700高负载工业机器人,配备电磁吸盘+自适应夹具.
部署周期:7日内完成视觉标定与机器人路径规划,无缝接入冲压产线。
技术优势解析
图漾3D相机的核心突破
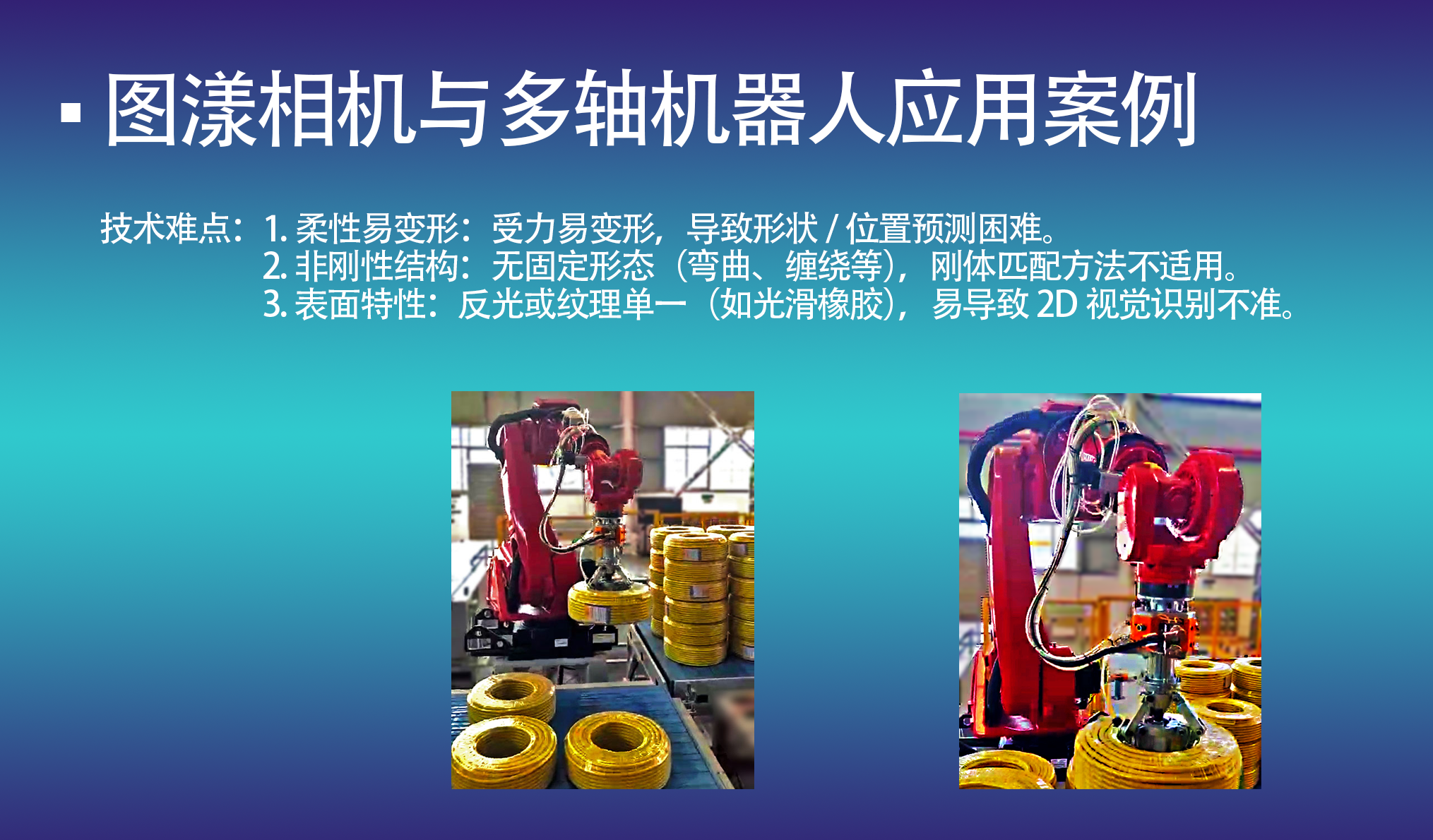
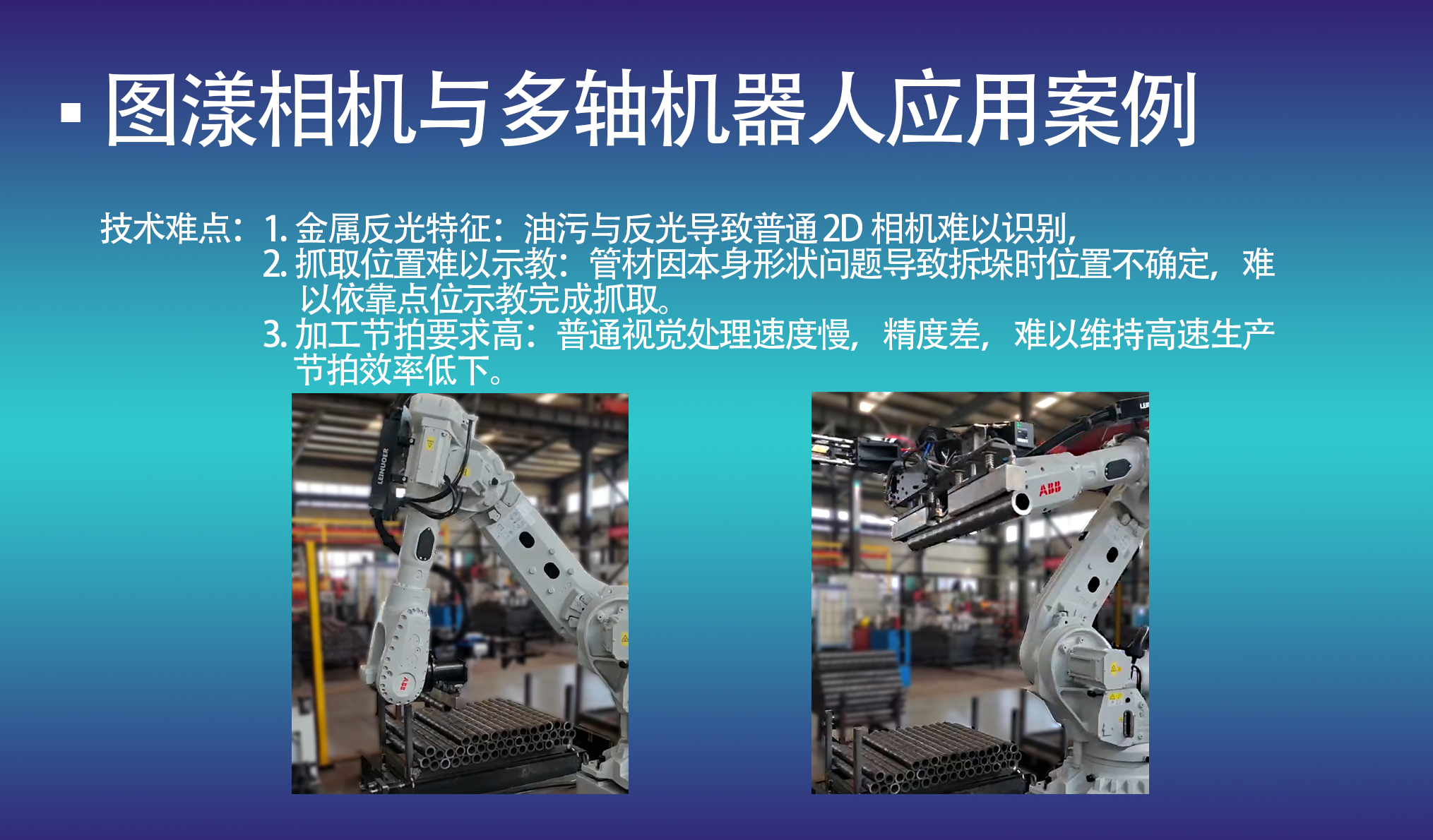
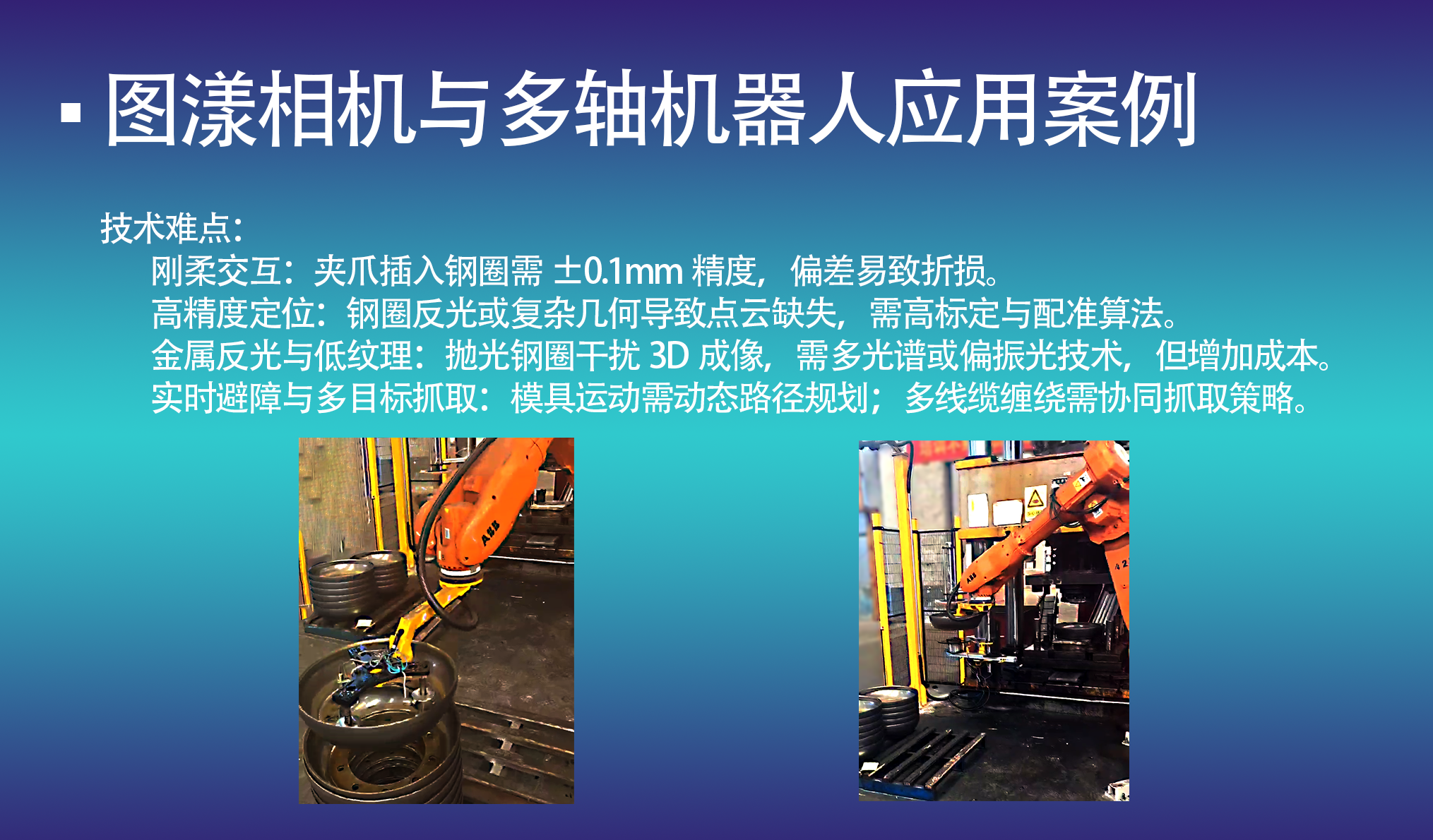
复杂表面识别:基于双目散斑结构光技术,精准捕捉反光金属钢圈的轮廓与姿态,3D点云分辨率达0.3mm,定位误差<3mm,解决传统2D视觉因反光导致的误判问题13;
动态抗干扰能力:内置AI算法实时补偿冲压车间粉尘、振动干扰,确保高速扫描(30帧/秒)下数据稳定性;
低代码开发:通过RVS平台拖拽式编程,快速适配钢圈多规格(直径300-600mm)、混合垛型(横竖交错堆叠),开发效率提升50%13。
ABB多轴机器人的协同优势
高柔性运动;避免传统六轴机器人需旋转180°的冗余动作,单次搬运节拍稳定在12-13秒,效率提升25%46;
高负载与同步控制:末端负载能力达90kg,支持与冲压机连续模式下的同步搬运,确保钢圈精准定位至模具腔体,定位精度±0.05mm57;
成本与效率升级
综合成本优势:
图漾相机凭借标准化硬件与开源算法接口,降低20%视觉系统集成成本13;
ABB机器人国产化产线(对比进口方案)节省30%设备投入,维护成本降低40%611。
效益提升:
单工作站替代4-5名人工,减少因钢圈磕碰导致的年损耗;
支持7×24小时连续冲压,日均处理量超2000件,投资回收期缩短至7个月。
场景效果呈现
视频中,图漾3D相机对高反光钢圈垛堆进行实时三维建模,通过深度学习分割算法区分不同直径与表面缺陷钢圈。ABB六轴机器人以“直线双速”模式平行移送钢圈至冲压机,电磁吸盘与柔性夹具协同作业,确保抓取无滑移、无划痕。冲压完成后,机器人将成品精准码放至托盘,全程节拍稳定无碰撞,良品率提升至99.8%。
总结:该方案深度融合图漾3D视觉的高精度感知能力与ABB多轴机器人的高柔性执行性能,攻克了金属反光件拆垛定位难、冲压同步要求高的行业痛点,以“智能识别+高效协作”的技术优势,为汽车制造、重型机械领域提供了高性价比的自动化升级范例