视频案例:柔性化线缆拆垛方案——图漾3D视觉+多轴工业机器人
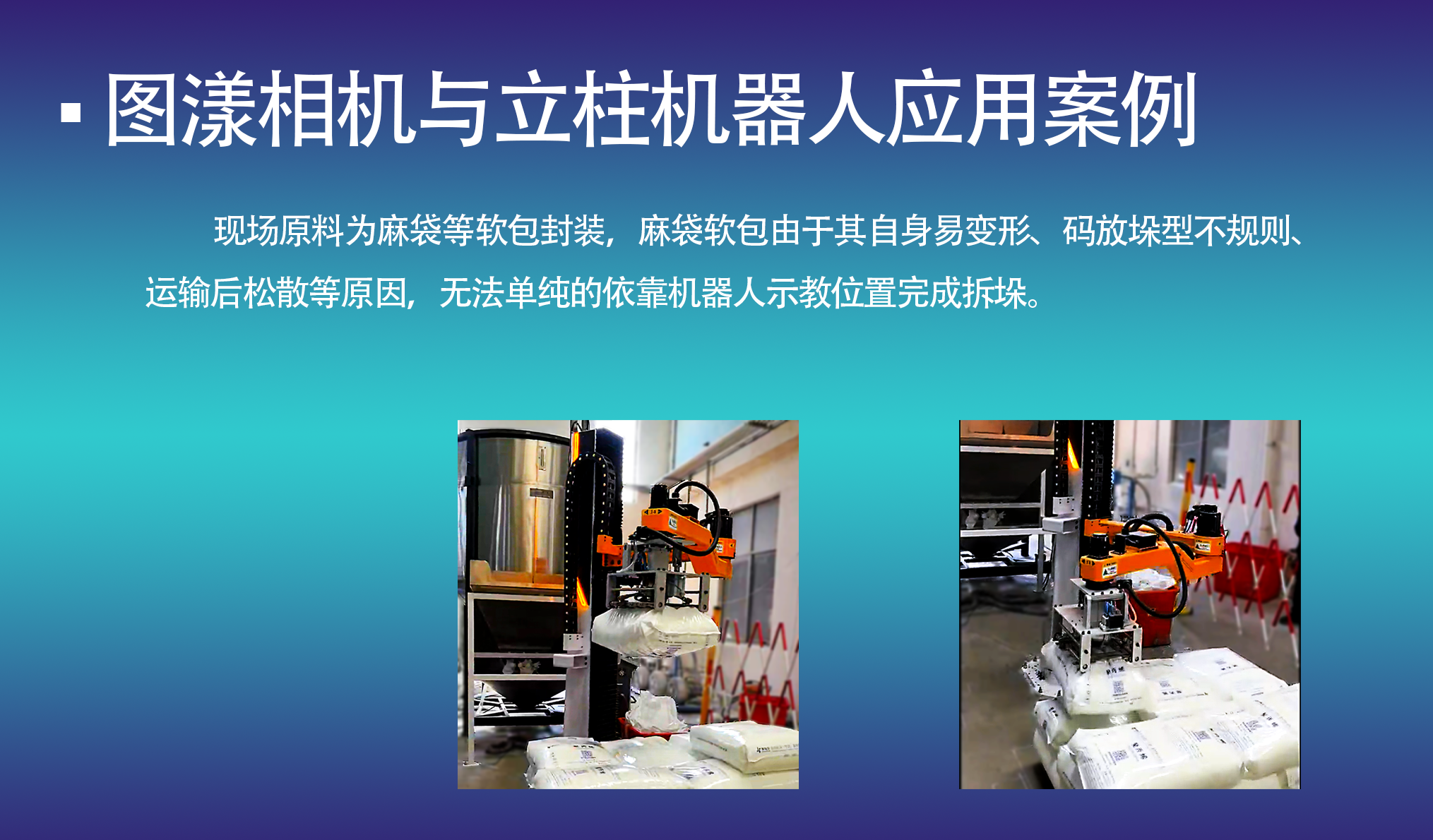
场景:某线缆制造企业成品仓库,需对多种规格、异形捆扎的线缆盘进行全自动拆垛及分拣。
方案配置
视觉系统:图漾科技FM815系列3D工业相机,搭载自研RVS算法平台,支持动态环境感知;
机器人:6轴高精度工业机器人,配备柔性夹具;
部署周期:7日内完成系统调试并接入产线。
技术优势解析
图漾3D相机的核心突破
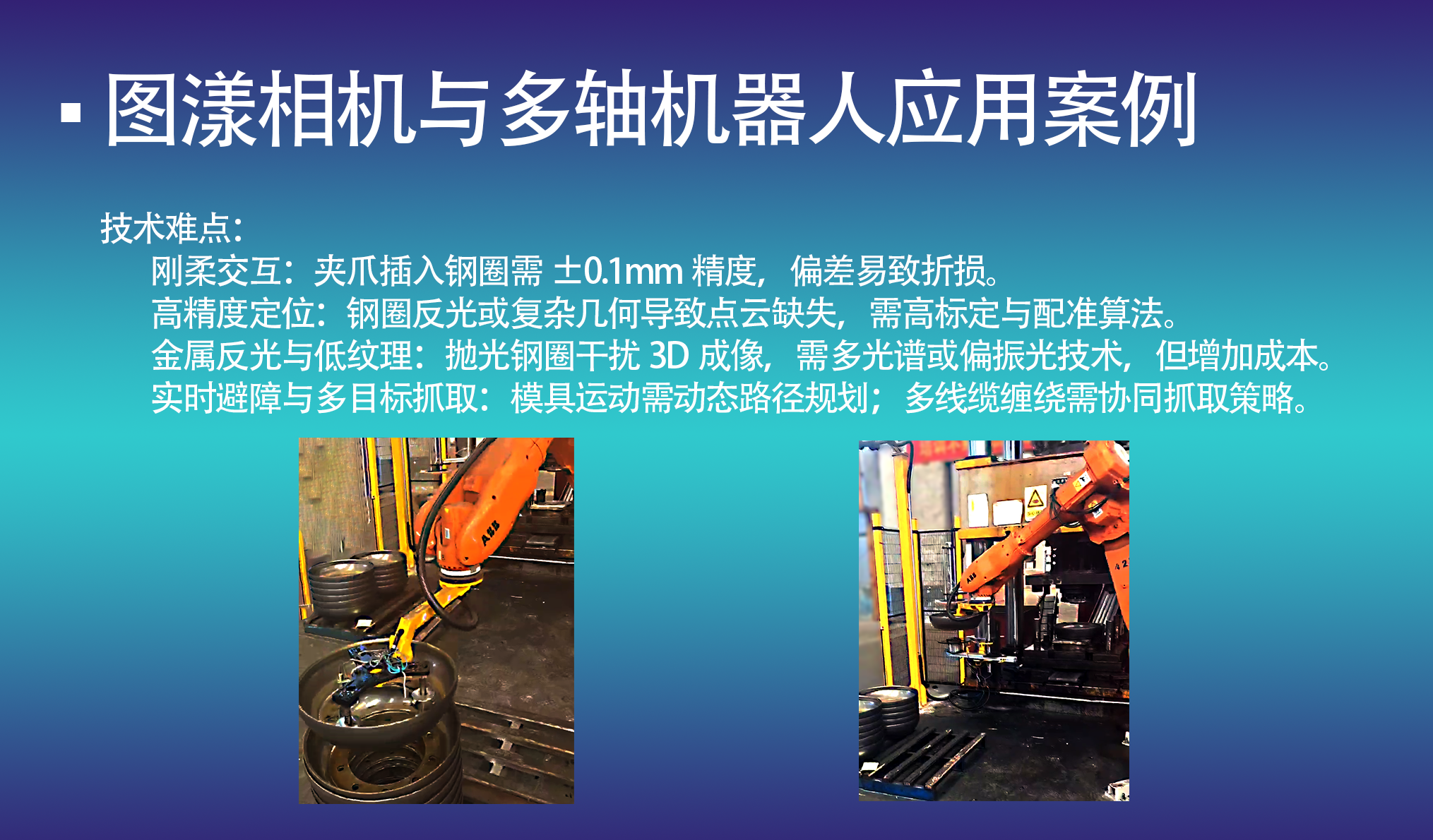
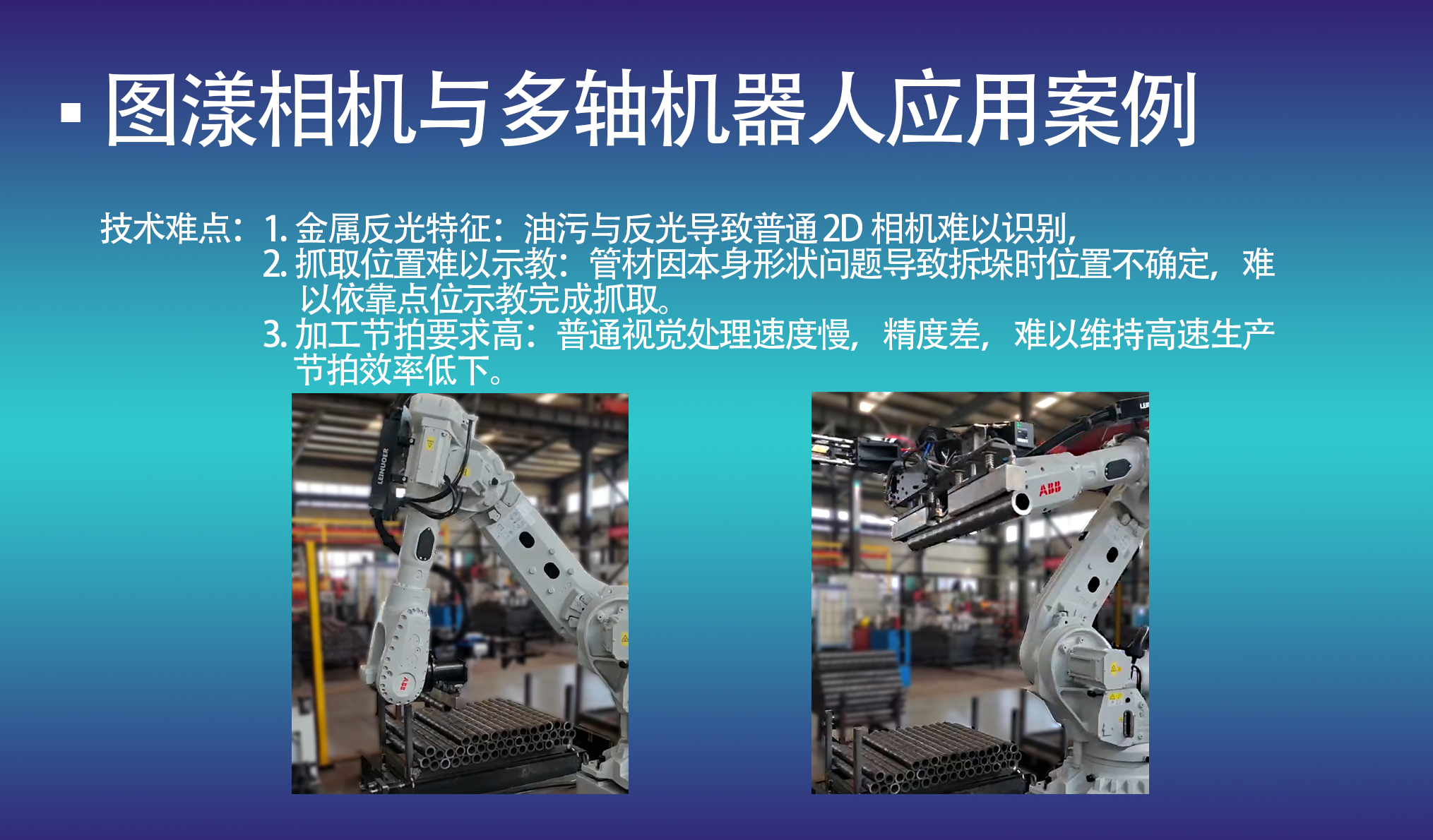
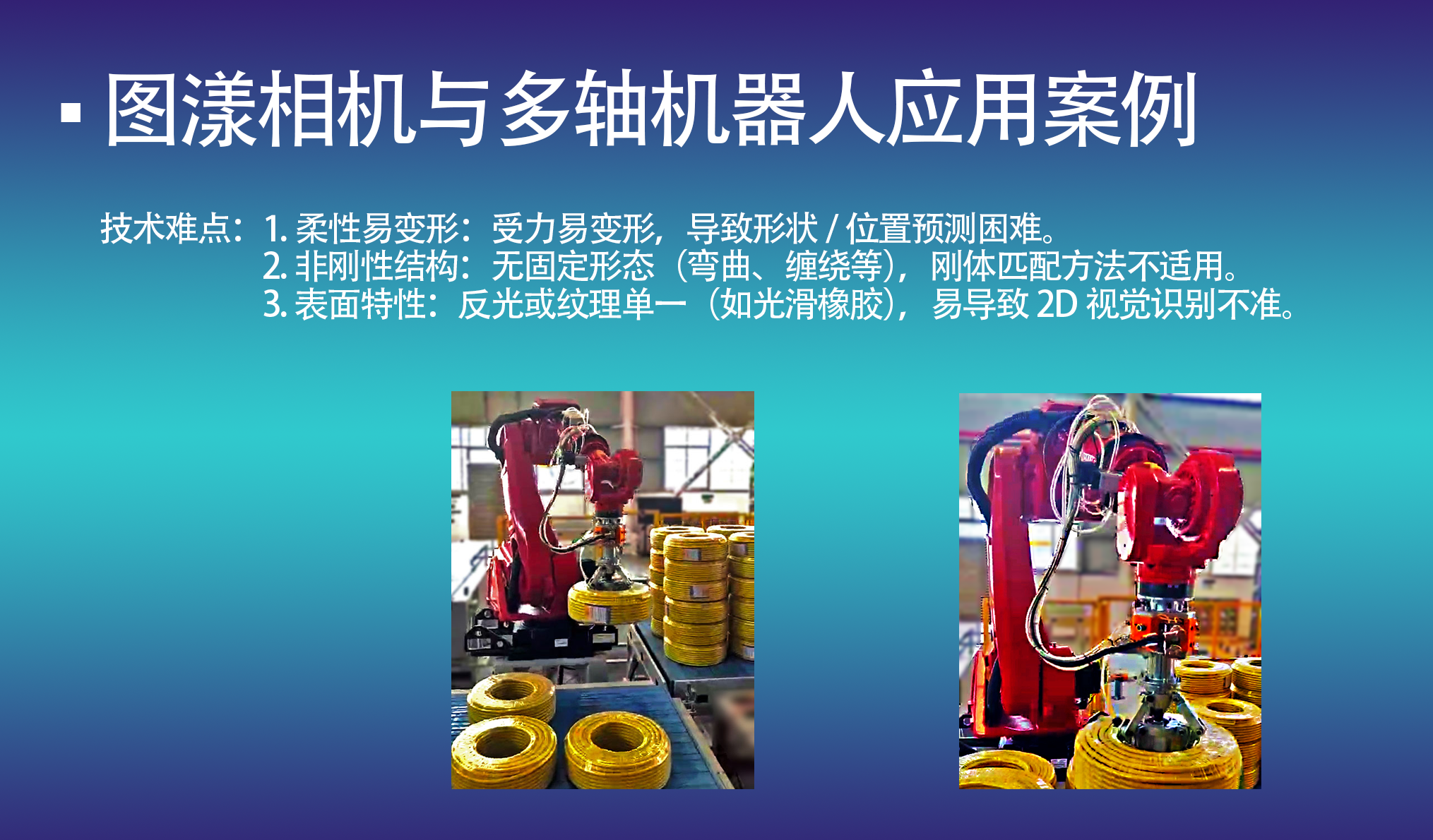
复杂场景适应性:基于双模(结构光+双目)融合技术,精准识别反光金属线缆、黑色橡胶表层或重叠捆扎的线缆盘,3D点云分辨率达0.8mm,定位误差<10mm;
动态实时纠偏:每秒30帧高速扫描,结合AI算法预判垛型倾斜、滑垛风险,实时调整机器人抓取路径;
多轴机器人的协同优势
全自由度作业:6轴联动实现360°无死角抓取,灵活应对线缆盘横放、竖叠、斜靠等复杂垛型;
高精度柔顺控制:±0.05mm重复定位精度,搭配力控模块自适应调节抓取力度,避免线缆表层划伤或变形;
高效节拍:单次抓取-放置循环时间≤45秒,支持与AGV、输送线无缝衔接。
成本与效率升级
综合成本优势:
图漾相机凭借开放API与预置算法库,降低30%开发调试成本;
多轴机器人国产化方案(对比进口品牌)节省50%硬件投入,维护成本降低40%。
效益提升:
替代5-6名高强度人工,减少因搬运损耗导致的年损失超10万元;
支持夜间无人化生产,产能利用率提升至95%,投资回收期缩短至8个月。
场景效果呈现
视频中,图漾3D相机对线缆进行快速三维建模,通过模板匹配快速匹配线缆位置。多轴机器人以“蛇形轨迹”避让垛堆间隙,与夹具协同抓取线缆盘,平稳转运至分类托盘。无碰撞、拆垛效率达80盘/小时,破损率降至2%以下。
总结:该方案依托图漾3D相机对复杂线缆垛的智能识别能力,结合多轴机器人高柔性、高精度的作业特性,攻克了传统机械臂难以适配异形线缆拆垛的痛点,以“视觉+执行”的双重技术优势,为重工、电力、通信行业提供低成本、高可靠性的自动化拆垛标杆案例。